





ISC41 - Double pack
Pairs well with
Verified EU-made.
Cyber security built into every component.
Remote troubleshooting & configuration help
ISC41 - Double pack
Product details
The SciMo ISC41 Double Pack is a highly integrated dual-channel DC/AC inverter solution designed for applications requiring the control of two independent motors or high-power redundancy. Built upon advanced Silicon Carbide (SiC) technology, it features two independent 6-pulse bridge power stages. The system is managed by an integrated Xilinx Zynq SoC controller, capable of executing complex model-based control (FOC) for two high-speed synchronous machines simultaneously, with fundamental frequencies up to 2 kHz per channel.
Key Technical Features:
-
Dual-Channel Architecture: Two independent SiC power stages in a single compact housing.
-
SiC Efficiency: Minimal switching losses and high thermal stability across both channels.
-
FPGA-Based Control: Centralized Xilinx Zynq-7000 SoC for deterministic, real-time control of dual propulsion units.
-
Scalable Integration: Designed for complex drivetrains (e.g., dual-motor eVTOL rotors or 4WD UGVs).
-
Robust Communication: Dual independent CAN 2.0A/B interfaces for seamless system integration.
-
Environmental Protection: Full IP65 rated enclosure with optimized liquid cooling paths for both power stages.
Specifications:
-
Continuous Power: 2x 390 kVA (@ 800 V)
-
Maximum Power: 2x 440 kVA (@ 800 V)
-
DC Link Voltage: Up to 900 V (Nominal 800 V)
-
Continuous Phase Current: 2x 400 Arms
-
Peak Phase Current: 2x 450 Arms
-
Weight: Approx. 9.8 kg (Significant weight saving compared to two Single Packs)
-
Ingress Protection: IP65
-
Cooling: Water/Glycol 50:50 (Integrated cooling circuit for both channels)
-
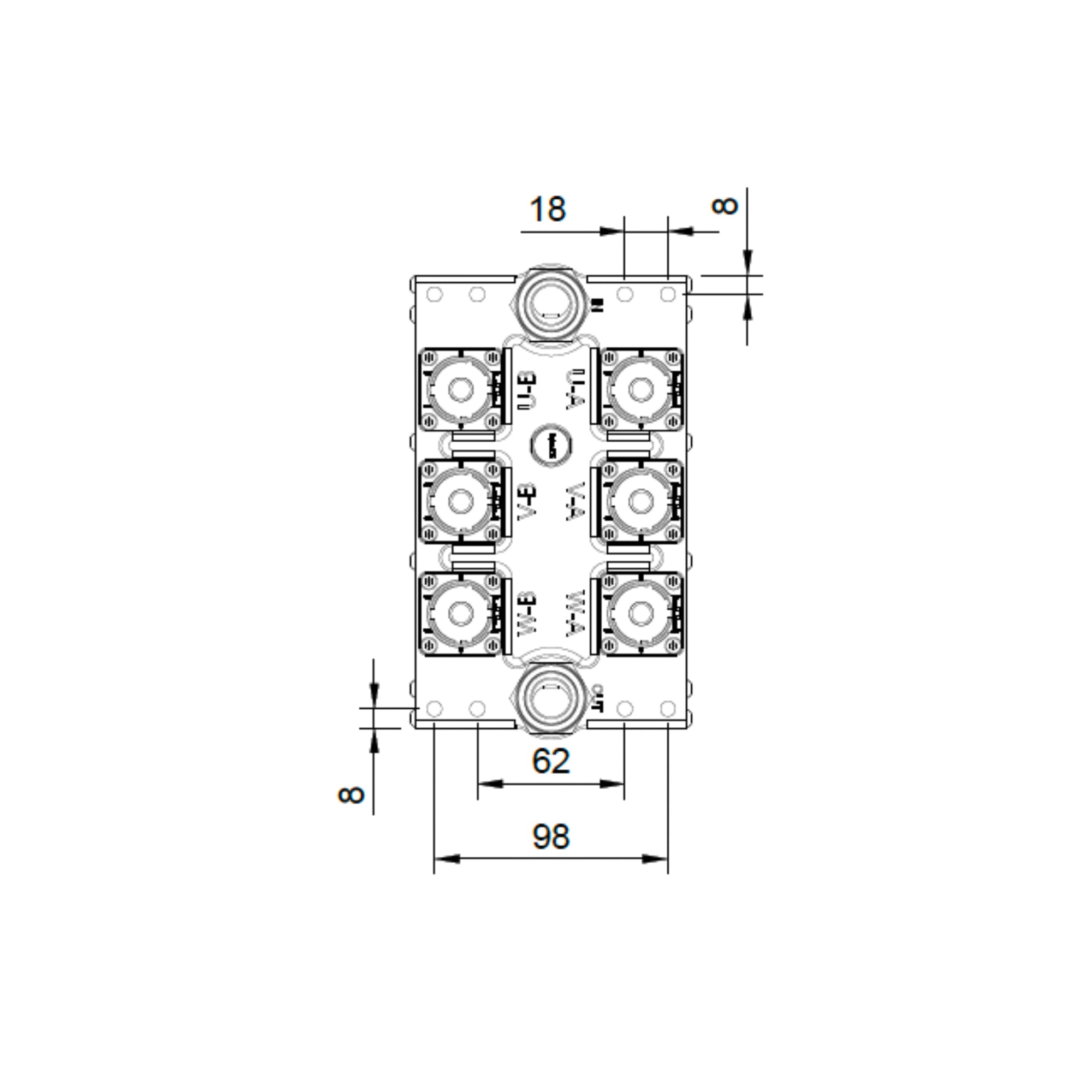
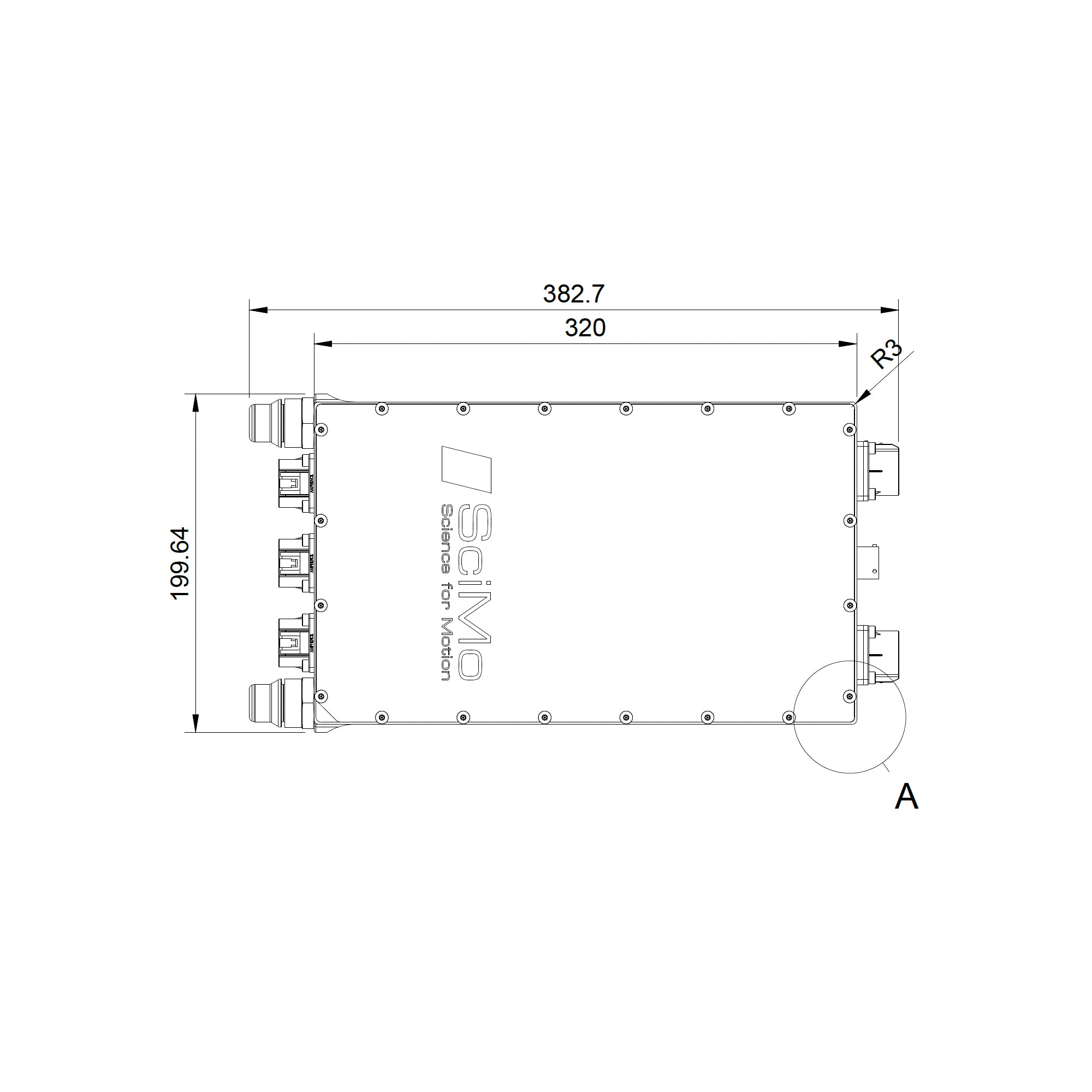
Dimensions: 345 mm x 320 mm x 65 mm
Connectors:
-
DC Input: High-current Amphenol PowerLok/HVPT series.
-
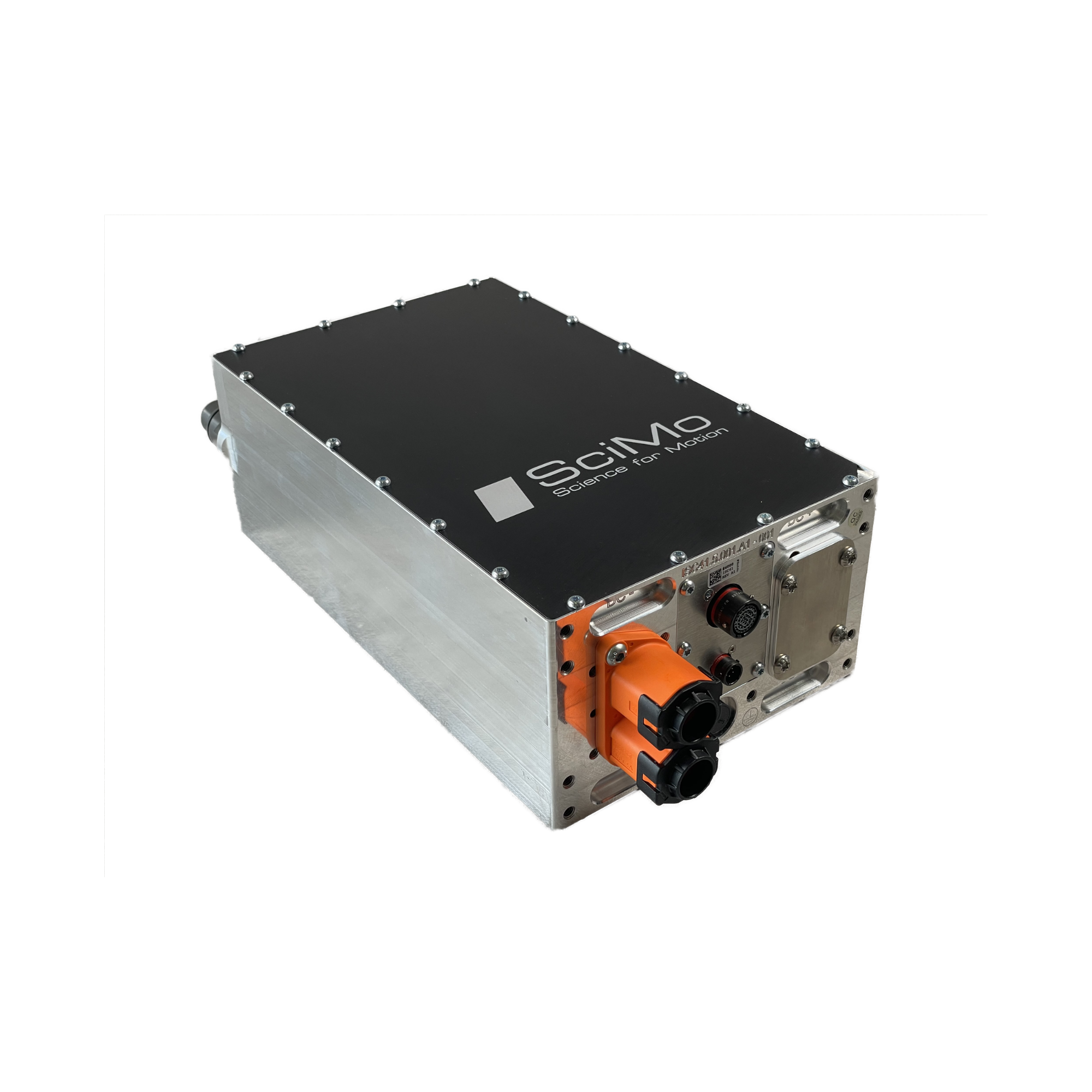
Phase Outputs: Independent Amphenol PowerLok interfaces for Motor A and Motor B.
-
LV/Control: High-density Souriau Mil-spec circular connectors for LV supply, dual CAN, and independent motor sensor feedback (Sin/Cos, Resolver, ABZ).
Applications: The Double Pack is specifically engineered for multi-rotor eVTOL platforms, heavy-duty dual-motor UGVs, and hybrid-electric propulsion systems where minimizing total system mass and maximizing power density per cubic centimeter is the primary engineering requirement.
Basic parameters
Max. continuous power
Max. peak power
Max. peak current (Arms)
Max. continuous current (Arms)
Max voltage DC-Link (V)
Nominal switching frequency
Max. switching frequency
Protection
Cooling method
Mechanical parameters
Dimensions
Weight (kg)
Documentation
Download Kos60 Specification Sheet
If you have any questions, you are always welcome to contact us. We'll get back to you as soon as possible, within 24 hours on weekdays.
-
Shipping Information
Use this text to answer questions in as much detail as possible for your customers.
-
Customer Support
Use this text to answer questions in as much detail as possible for your customers.
-
FAQ’s
Use this text to answer questions in as much detail as possible for your customers.
-
Contact Us
Use this text to answer questions in as much detail as possible for your customers.
FAQs
Please read our FAQs page to find out more.
What does an ESC do?
The ESC (Electronic Speed Controller) is the brain of the electric propulsion system. It regulates the current sent to the motor phases to achieve the required speed and torque. It also includes key protection features such as overcurrent, undervoltage, and overtemperature safeguards to prevent damage to the motor and power electronics.
How is the ESC controlled?
The ESC can be controlled by a flight controller, an autopilot, or directly by a transmitter or throttle signal. The most common control interfaces are PWM, CAN, and UART. PWM is simple and widely supported, while CAN and UART enable two-way communication for telemetry, configuration, and advanced diagnostics.
What happens if the ESC overheats?
Most ESCs monitor temperature via internal sensors. If protection is enabled, the ESC will reduce power or shut down. Without thermal protection, overheating can damage MOSFETs or capacitors and permanently destroy the controller.
How to prevent ESC overheating?
Provide adequate airflow or liquid cooling, depending on the ESC design. Avoid overloading the motor, since excessive current directly increases ESC temperature. Ensure correct propeller size or load and verify that wiring and connectors can handle the rated current.
What maintenance does an ESC require?
ESCs are maintenance-free. Keep them clean and dry. Use compressed air to remove dust, and check connectors periodically for corrosion or loose pins. Always make sure the ESC firmware is up to date.